|
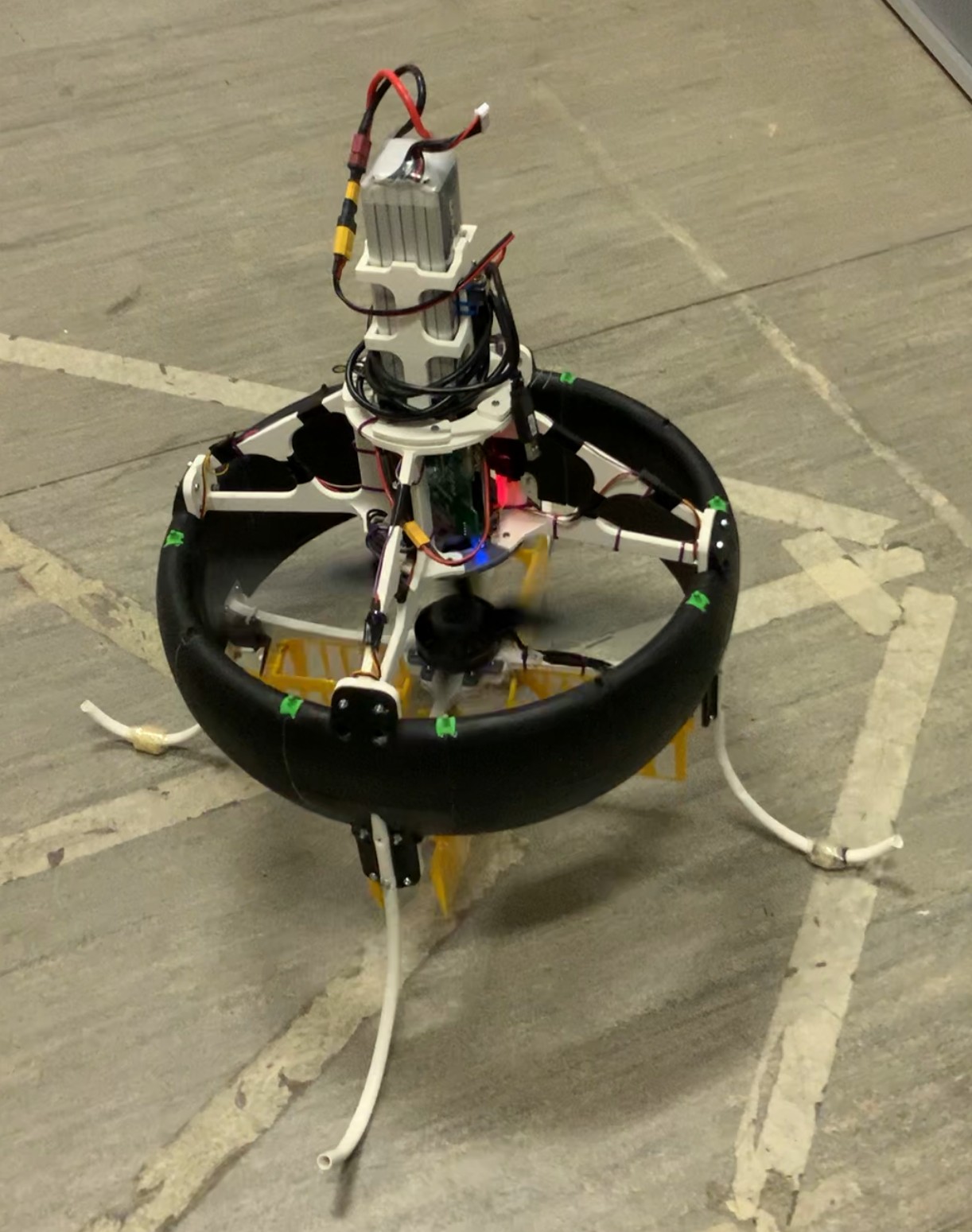
Aerial Robotics
La ricerca riguarda la progettazione di velivoli innovativi e dei loro sistemi di guida, navigazione e controllo. I campi di studio riguardano la navigazione GNSS-denied, con visione, con LIDAR, il controllo del volo non-lineare adattivo oltre a metodologie di riconoscimento target automatiche con tecniche classiche ed intelligenza artificiale. Missioni coordinate tra più veicoli anche in domini diversi sono un altro campo di studio.
|
|
|
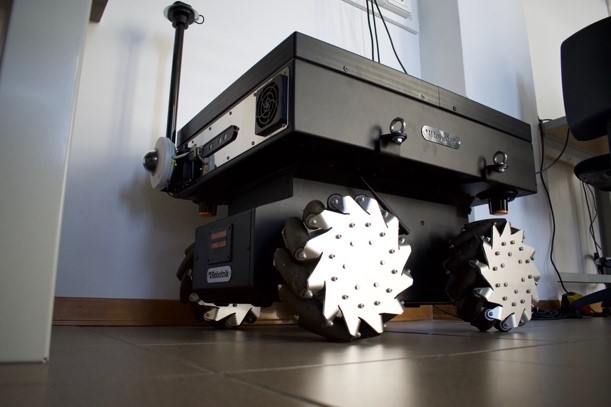
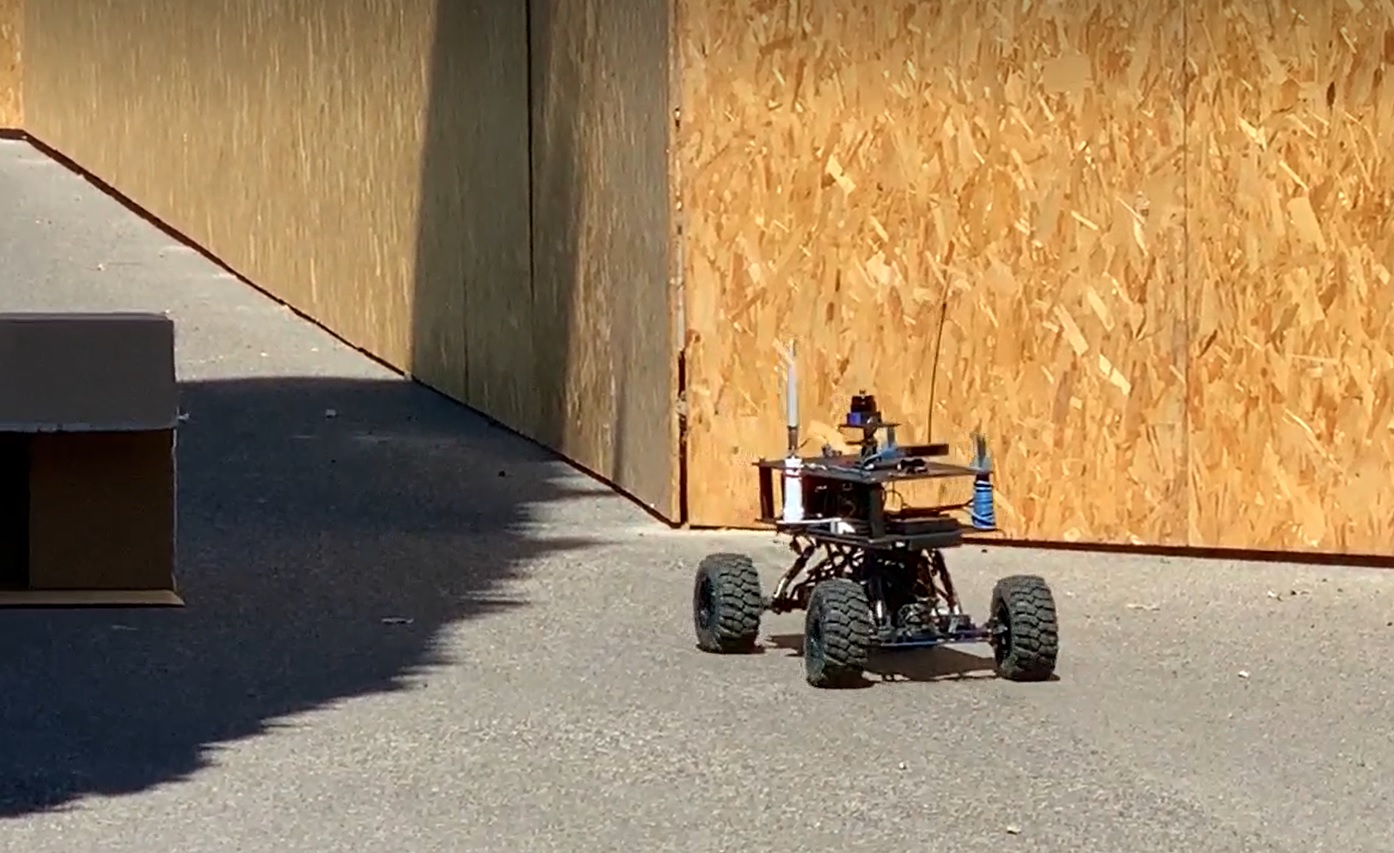
Ground Robotics
L'area di ricerca riguarda la progettazione di veicoli terresti innovativi con ruote o gambe o altri sistemi di locomozione, sia per uso indoor che outdoor, e dei loro sistemi di guida navigazione e controllo, che operino da soli o in cooperazione con altri robot anche diversi. I campi applicativi sono molteplici, dall'esplorazione di ambienti sconosciuti, alla logistica, alle lavorazioni agricole, passando per la sicurezza fino al supporto di operatori umani in contesti lavorativi o assistenziali.
|
|
|
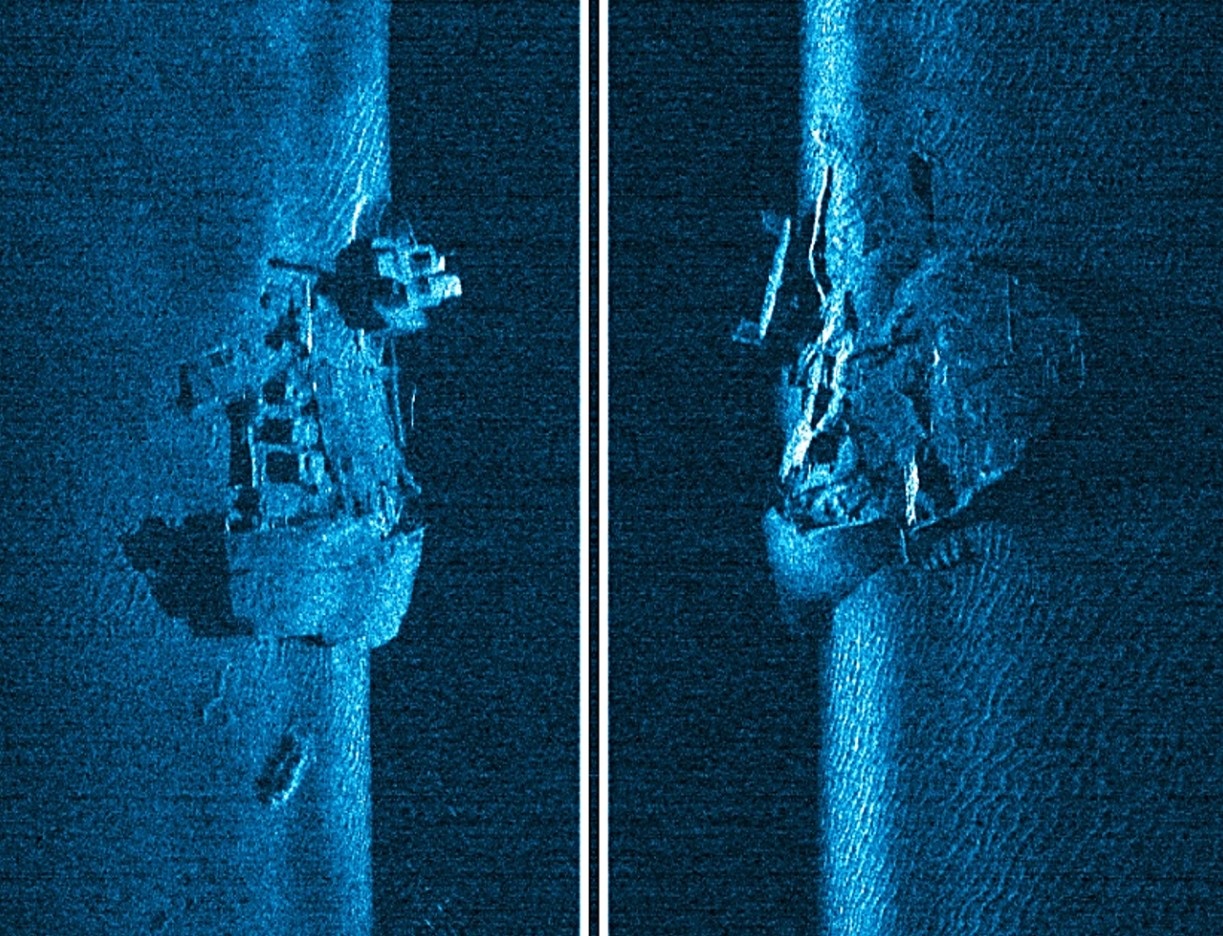
Marine Robotics
La ricerca in Robotica marina persegue avanzamenti rispetto capacità autonome di veicoli di superficie e subacquei cooperanti per affrontare missioni complesse condividendo compiti tra loro e decisioni con l’operatore umano secondo le proprie peculiarità. Si affrontano quindi, tra le altre, tematiche di modellazione della propagazione acustica, comunicazione e cooperazione, percezione dell’ambiente tramite sensori ottici e acustici, processamento dei dati a bordo in tempo reale tramite tecniche di intelligenza artificiale ed autonomia condivisa.
|
|
|
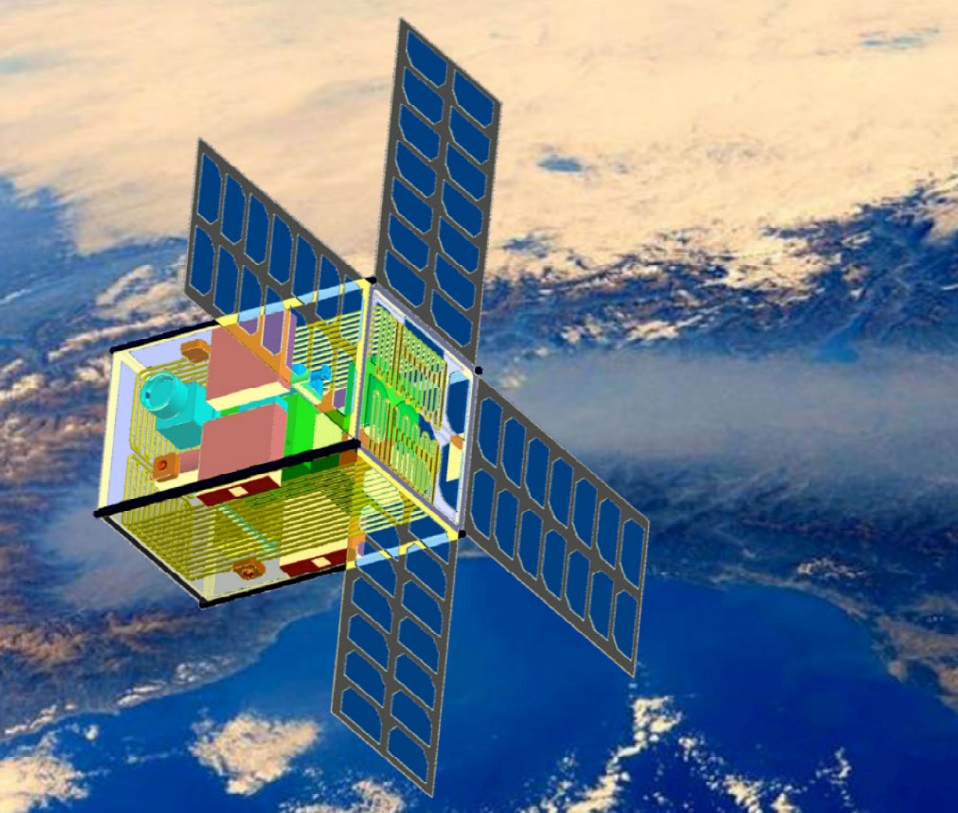
Space Robotics
L'area di ricerca riguarda la progettazione di sistemi di guida, navigazione e controllo per veicoli e missioni spaziali: manovre di prossimità, sensori innovativi, metodi di test innovativi, algoritmi di GNC innovativi, orbite non kepleriane e problema dei 3 corpi.
|
|
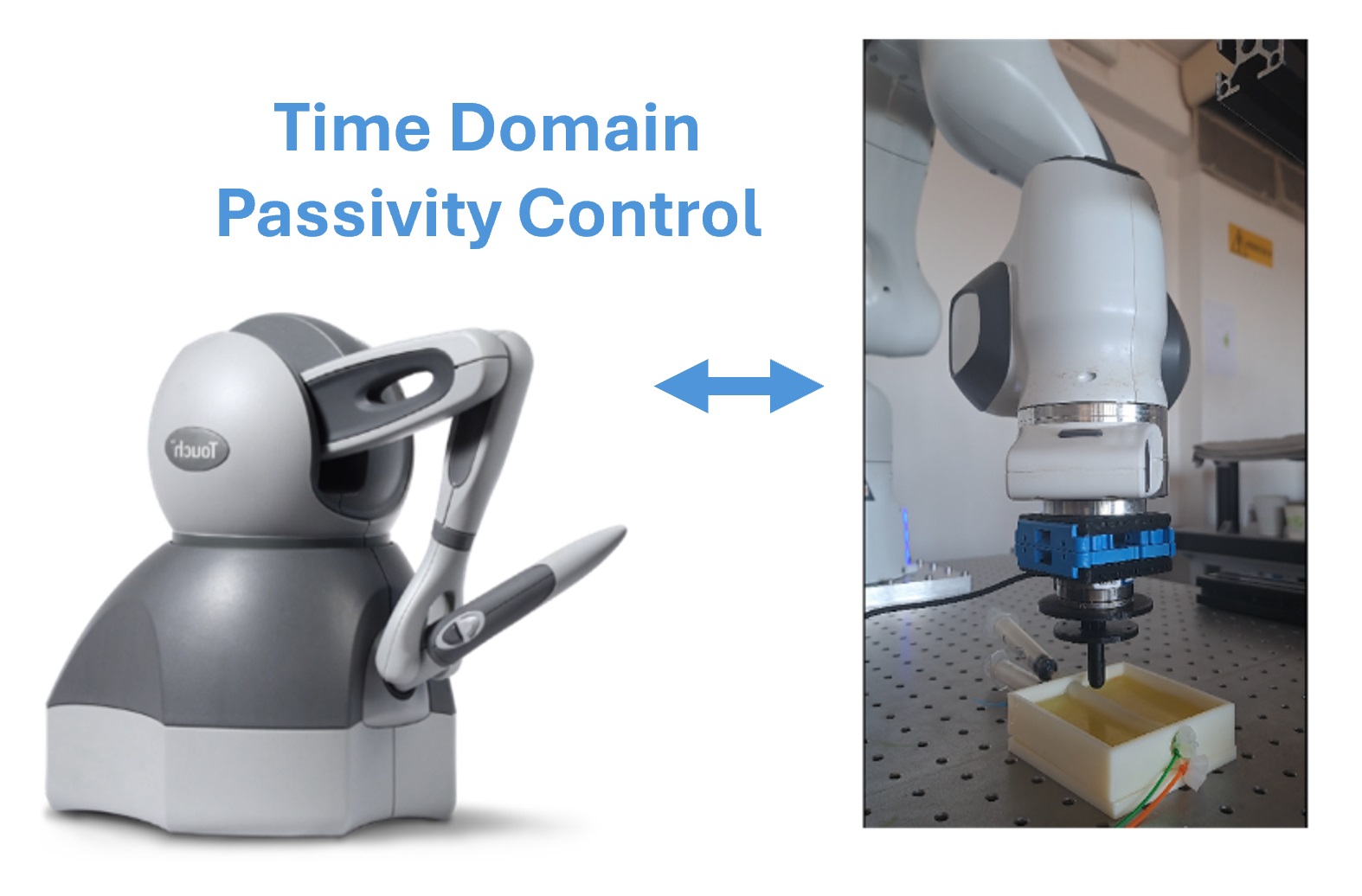
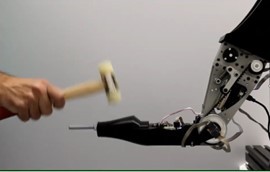
| Interfacce Aptiche e Telerobotica
La ricerca sulle interfacce aptiche prevede lo sviluppo di sistemi per l’acquisizione dell’informazione tattile derivante dal contatto con oggetti esterni, e la sua restituzione non invasiva, per la realtà aumentata, l’interazione avanzata uomo-robot, la robotica autonoma e la telerobotica.
|
|
|
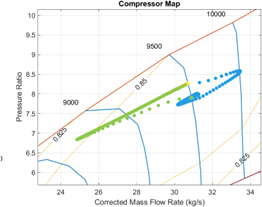
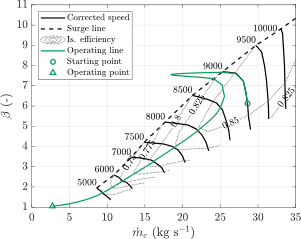
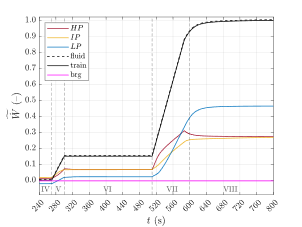
Modellazione dinamica e controllo per la sostenibilità dei sistemi energetici
Sviluppo di modelli dinamici e strategie di controllo e regolazione per migliorare la sostenibilità e l’efficienza dei sistemi energetici, affrontando le sfide della transizione energetica. L'obiettivo è ottimizzare la gestione delle risorse e la resilienza dei sistemi, facilitando l'integrazione delle fonti rinnovabili e promuovendo soluzioni a basso impatto ambientale.
|
|
|
Natural Intelligence
Esplora la sinergia tra intelligenza artificiale avanzata e design robotico innovativo per sviluppare sistemi soffici, adattivi e resilienti. Copre lo sviluppo di attuatori ed end-effector fino al controllo di robot complessi a molti gradi di libertà. Integra controllo ottimo, apprendimento e pianificazione in condizioni di incertezza per garantire prestazioni robuste. Le applicazioni affrontano sfide reali come il cambiamento climatico, l’invecchiamento della popolazione e la carenza di manodopera.
|
|
|
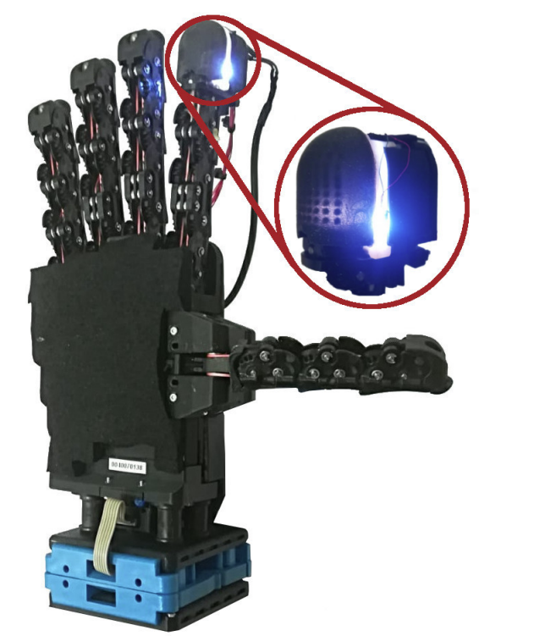
Robotica Soft, Attuazione ad Impedenza Variabile e Sotto-attuazione
Studio di robot realizzati includendo materiali morbidi e deformabili, spesso ispirati alla natura, per facilitare l’interazione in ambienti complessi.
|
|
|
Robotica di Servizio e Controllo ad Autonomia Condivisa
Sviluppo di robot in grado di interagire con l’uomo in ambienti quotidiani (musei, ospedali, abitazioni), e delle capacità di controllo condivise tra utente e macchina per garantire sicurezza e flessibilità.
|
|
|
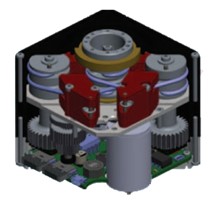
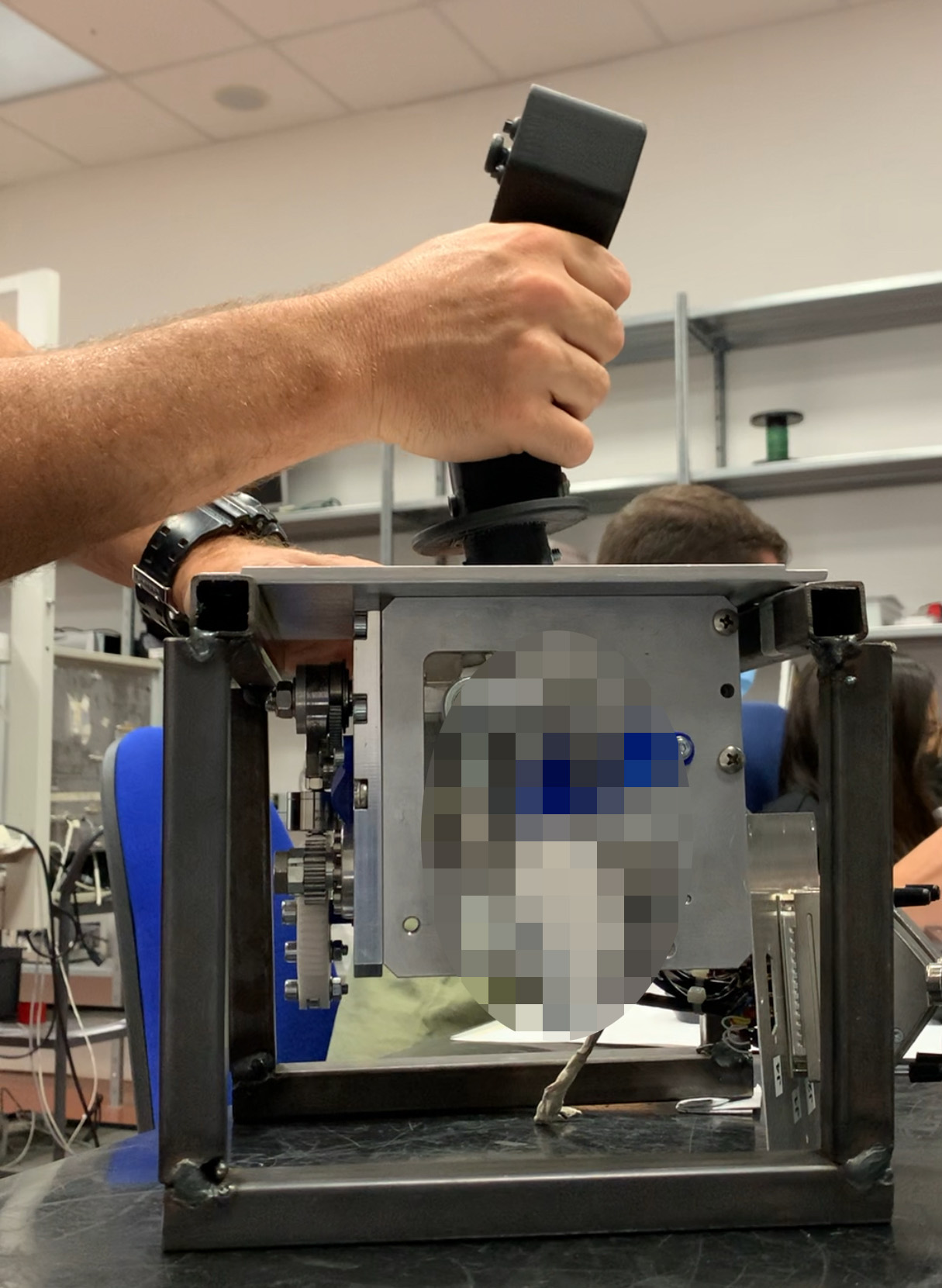
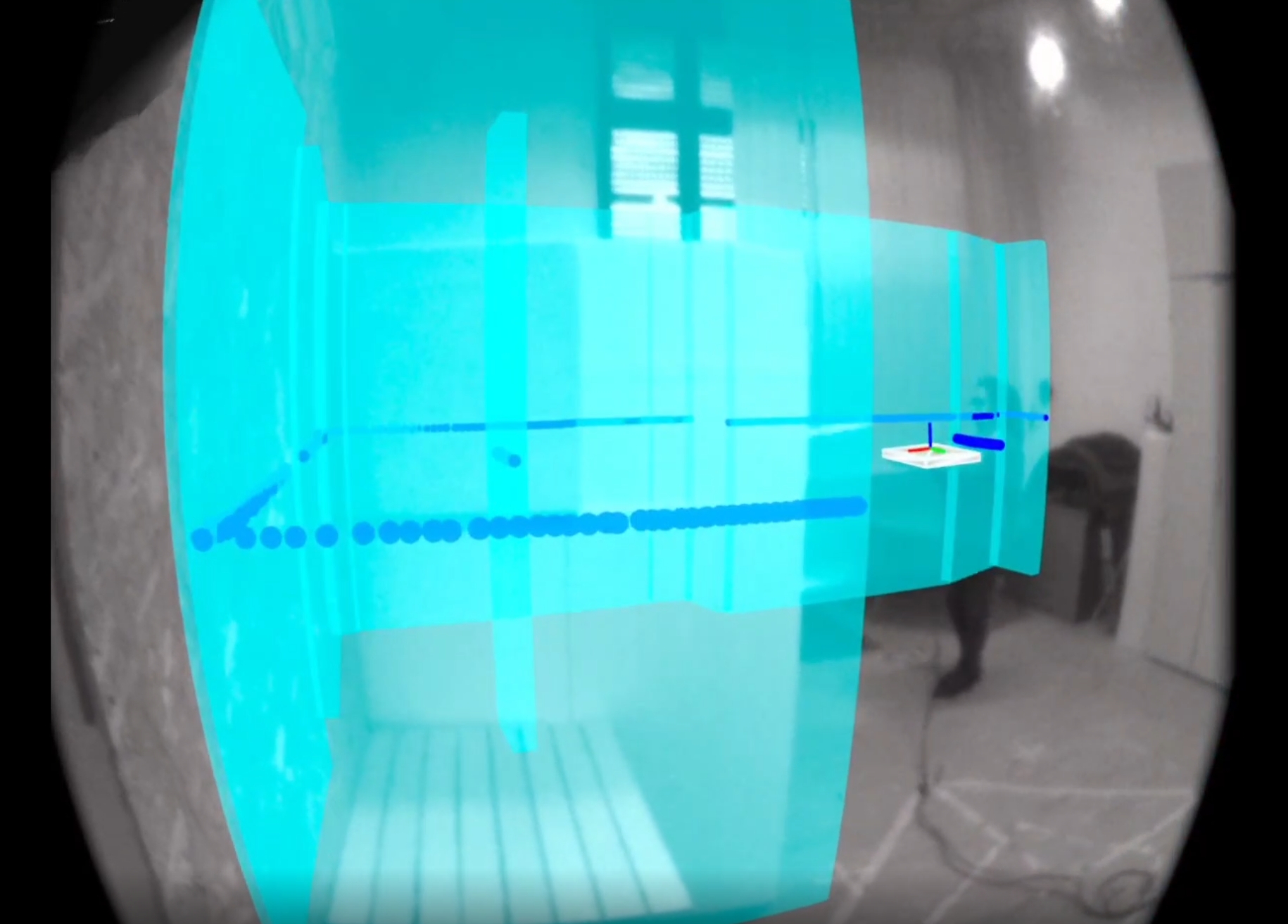
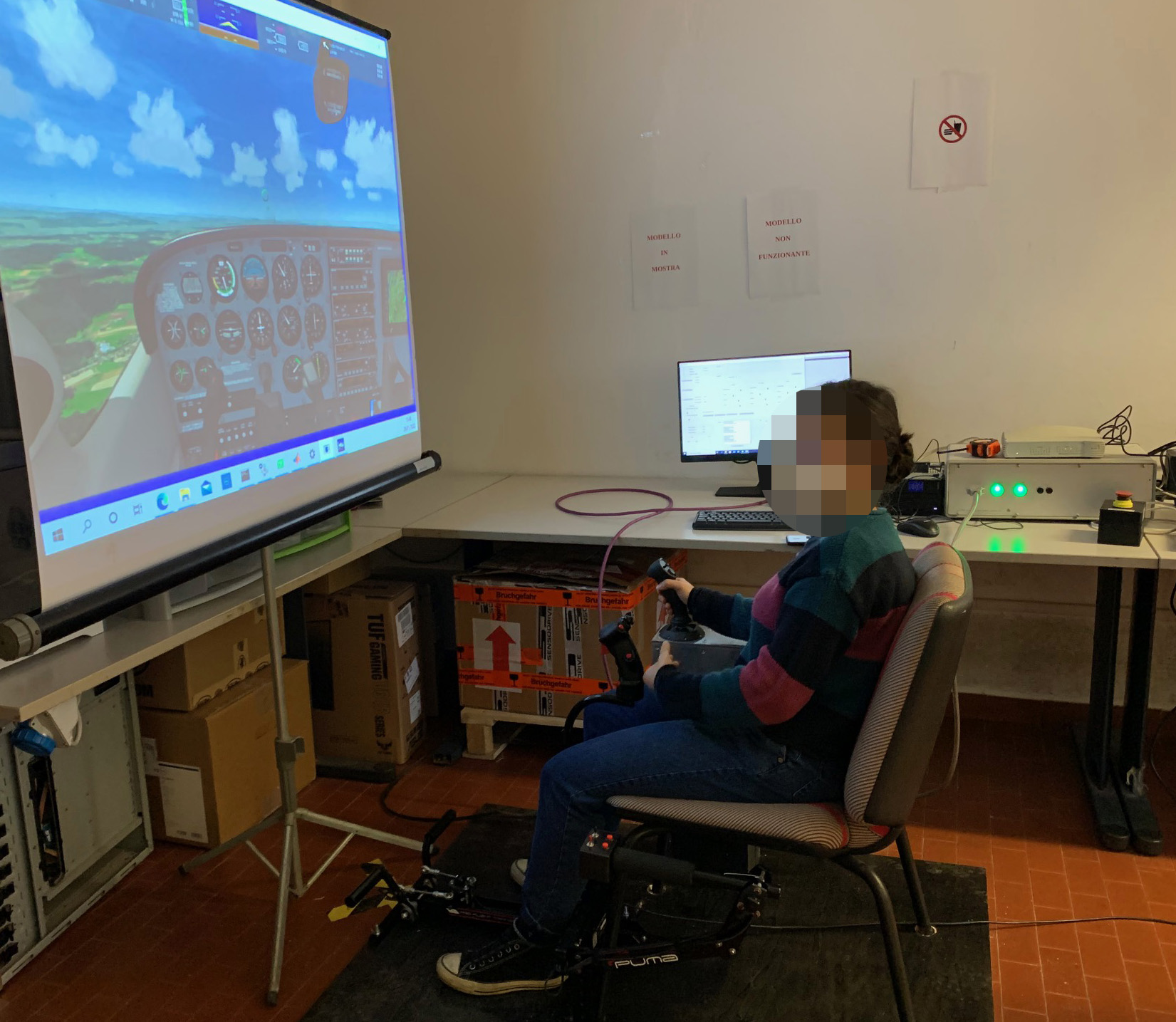
Interfacce Uomo-Macchina
L'area di ricerca riguarda la progettazione di interfacce uomo macchina, in particolare con ritorno di forza (o haptiche), specificamente pensate per agevolare il pilotaggio di veicoli sia manned che unmanned. Lo studio si concentra sulla realizzazione di dispositivi ed i relativi sistemi di controllo per aiutare il pilota del mezzo a compiere il proprio compito quale ad esempio: seguire una traiettoria, evitare gli ostacoli, effettuare una manovra con precisione. Le attività riguardano anche la progettazione di sistemi di realtà aumentata per migliorare la situational awareness del pilota di mezzi remoti.
|
|
|
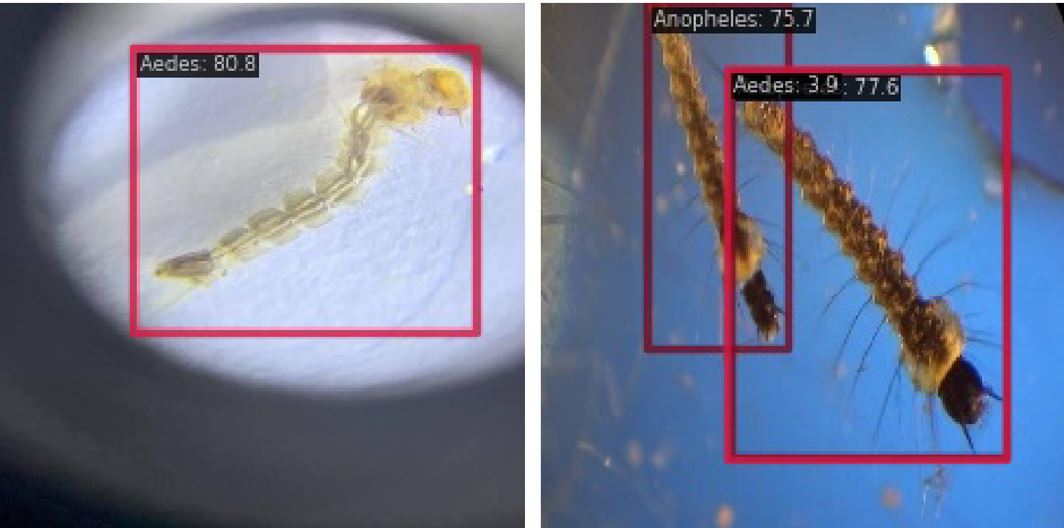
Modelli predittivi e strategie ottimali per la gestione delle pandemie e delle malattie trasmesse da vettori
L’attività di ricerca si concentra sull’uso di modelli matematici predittivi e tecniche di controllo ottimale per guidare le politiche socio-economico-sanitarie nella gestione delle pandemie con l’obiettivo di bilanciare costi sanitari ed economici, migliorando la resilienza dei sistemi sanitari. Attualmente, il lavoro si estende allo studio delle malattie trasmesse da vettori animali (es. zanzare), integrando il comportamento umano nei modelli e sviluppando tecniche innovative di classificazione delle immagini per monitorare le specie vettoriali e rilevare precocemente i focolai.
|
|
|
Embedded Control Systems
Progettazione di algoritmi e sistemi di controllo e monitoraggio, basati sulla modellazione in tempo reale e orientati all'implementazione su piattaforme con risorse di calcolo limitate (sistemi embedded a microcontrollore di livello automobilistico/industriale), con particolare attenzione alle applicazioni di elettronica di potenza e azionamenti elettrici nei settori dell'automotive, della robotica e dell'automazione industriale.
|
|
|
Digital-twin and AI-based Monitoring for Automotive, Space and Naval Electronics
Soluzioni avanzate per il monitoraggio di anomalie e cyberattacchi e per problematiche di sicurezza di sistemi meccatronici di interesse industriale (Automotive, Automazione Industriale, Navale, Satellitare, Robotica, ecc.), con particolare attenzione alla progettazione di modelli dinamici multi-dominio e real-time e di algoritmi di predizione basati su machine learning e intelligenza artificiale.
|
|
|
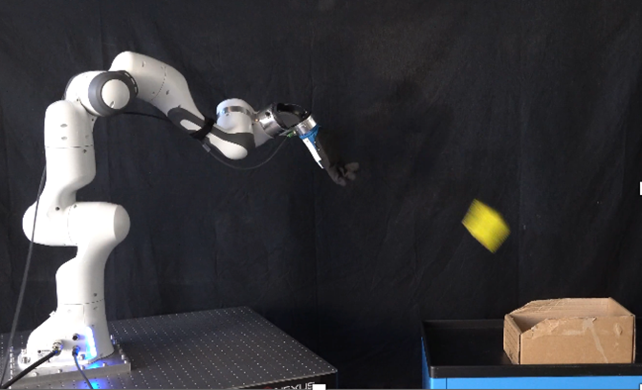
Robot di produzione dinamici e agili per processi intralogistici
Realizzare una nuova generazione di robot di produzione agili dotati di attuatori elastici a basso consumo energetico per eseguire movimenti altamente dinamici e facili (e convenienti) da implementare.
|
|
|
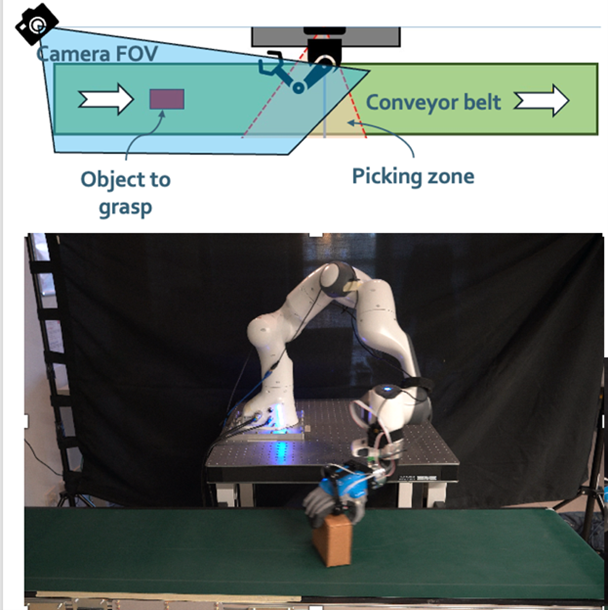
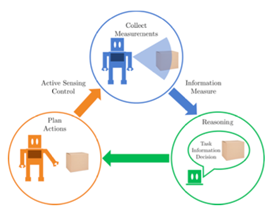
Pianificazione del movimento consapevole dei rischi per l’esecuzione di azioni più efficienti limitando al contempo i rischi associati
Studiare algoritmi di pianificazione e controllo ottimali per migliorare il livello informativo dei dati provenienti dai sensori, riducendo al minimo i rischi in un ambiente dinamico e incerto.
|
|
|
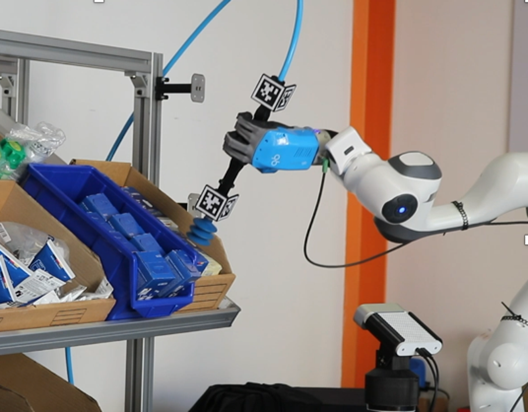
Sistemi Embedded e Meccatronica
La ricerca riguarda: pianificazione, attuazione e controllo di robot tramite microcontrollori, sistemi embedded e intelligenza artificiale per: Grasping e manipolazione robotica, Navigazione autonoma in applicazioni mobili, esoscheletri, sistemi robotici e di misura indossabili per Wellness, Lavoro e Health.
|
|
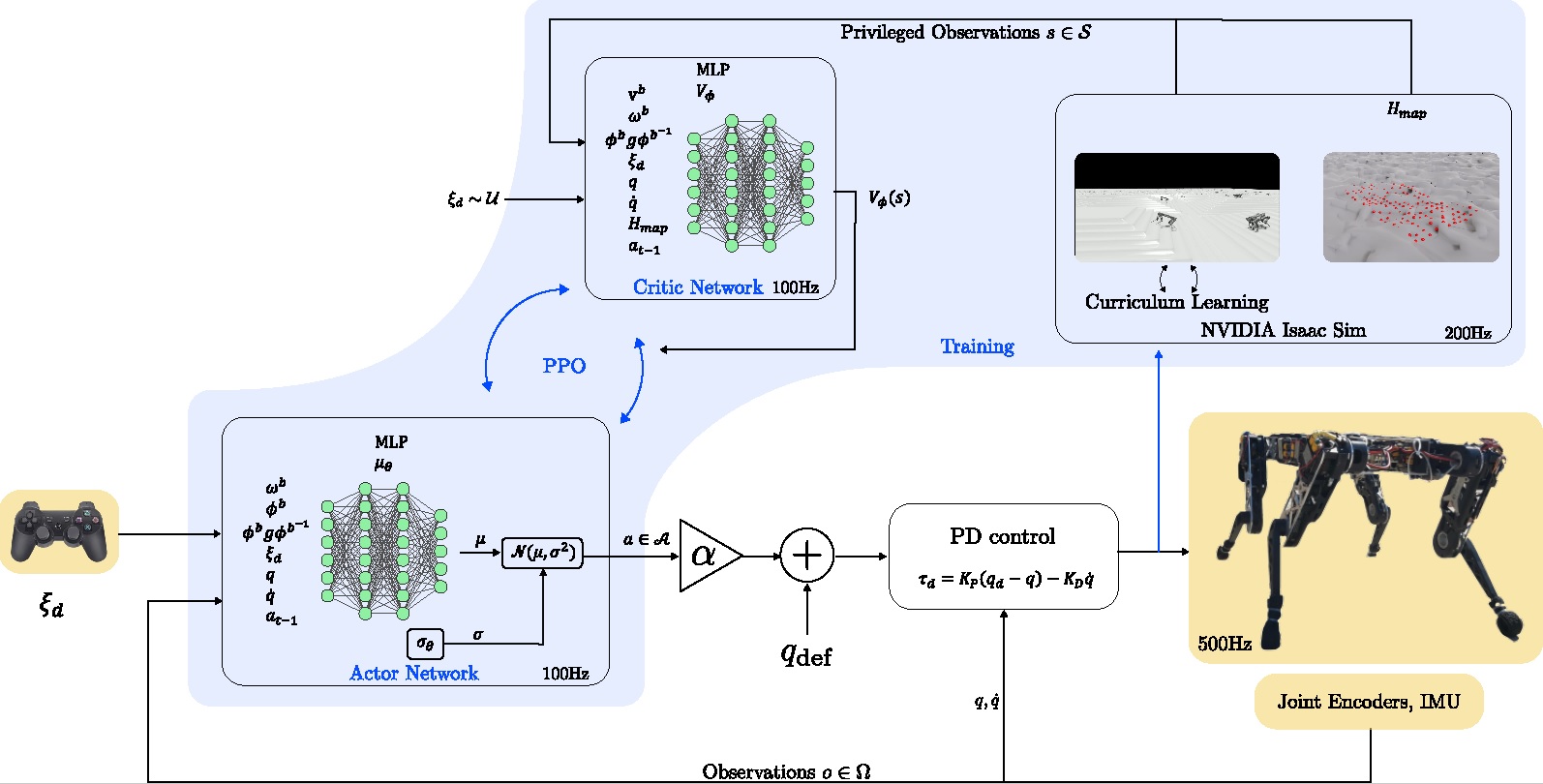
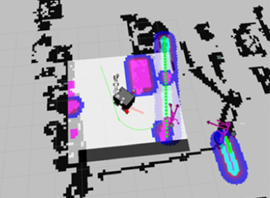
| Modelli di AI per robot autonomi intelligenti
La ricerca riguarda lo studio e la sperimentazione di reti neurali e modelli di reinforcement learning per la percezione, fusione sensoriale (telecamera e lidar)
e controllo applicati a sistemi autonomi, quali robot quadrupedi, rover, droni e
auto a guida autonoma.
|
|


")
")