")
")
Questa pagina presenta brevemente i Laboratori dove svolgono le loro attività di ricerca i docenti del corso di studio ed ai quali è possibile accedere per svolgere le attività del Corso Laboratorio di Automazione e Robotica oppure della propria Tesi di Laurea.
La pagina presenta anche i principali filoni di ricerca nei quali sono coinvolti i docenti del Corso di studio ed ai quali è possibile partecipare per le attività del Corso Laboratorio di Automazione e Robotica, per quelle della propria Tesi di Laurea, come studenti del Dottorato di Ricerca o vincitori di Borse di Studio e Approfondimento o Borse di Ricerca.
Informazioni di dettaglio sulle attività di ricerca condotte dai docenti che insegnano nel corso di studio possono essere reperite sulle pagine UNIMAP dei docenti.
Informazioni generali possono essere trovate sul sito del Dipartimento di Ingegneria dell'Informazione.
Laboratori
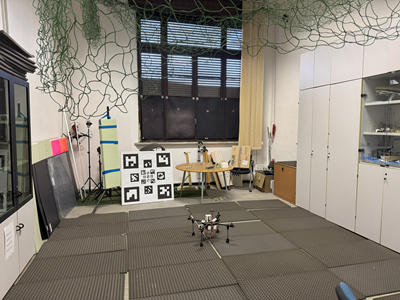 |
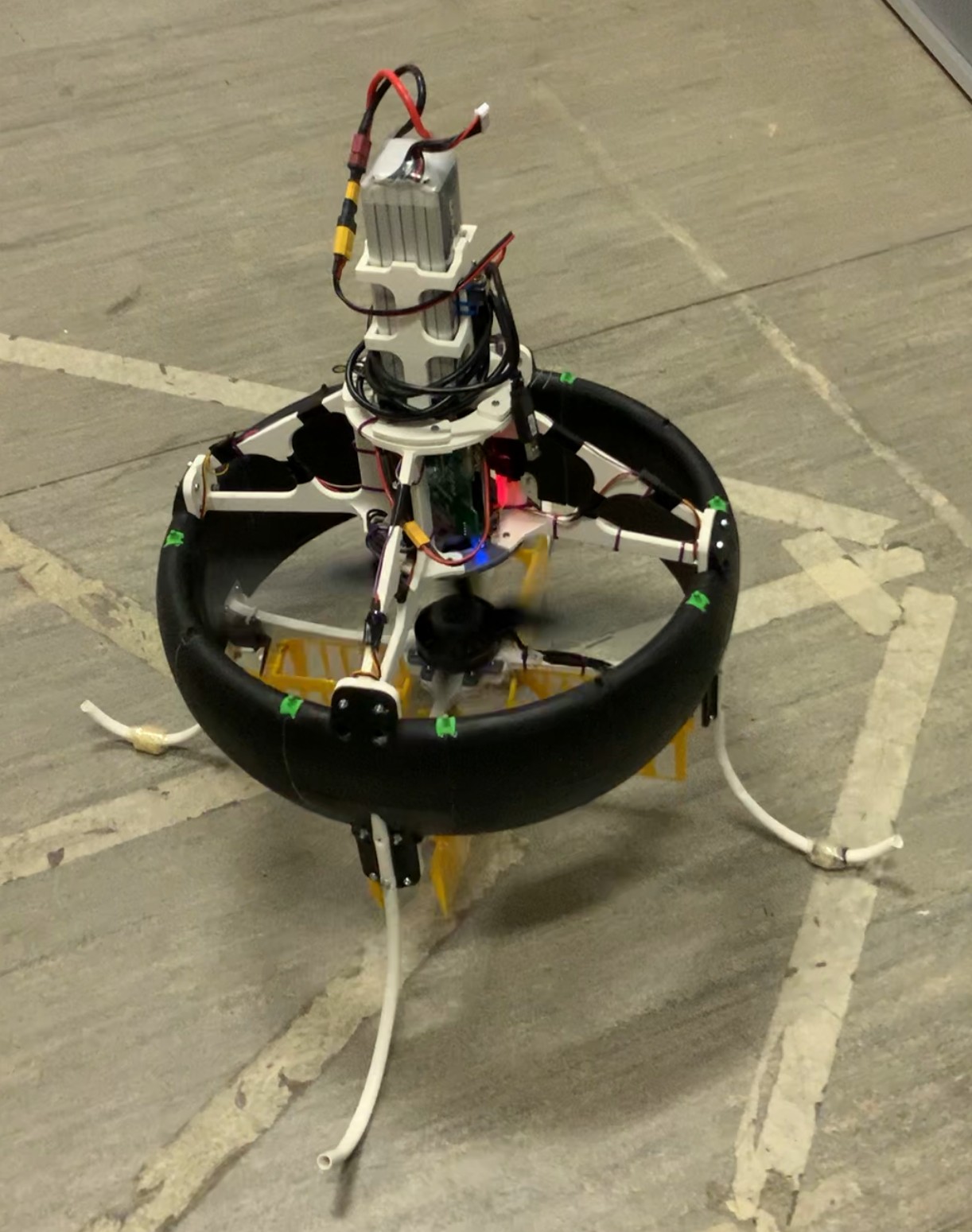
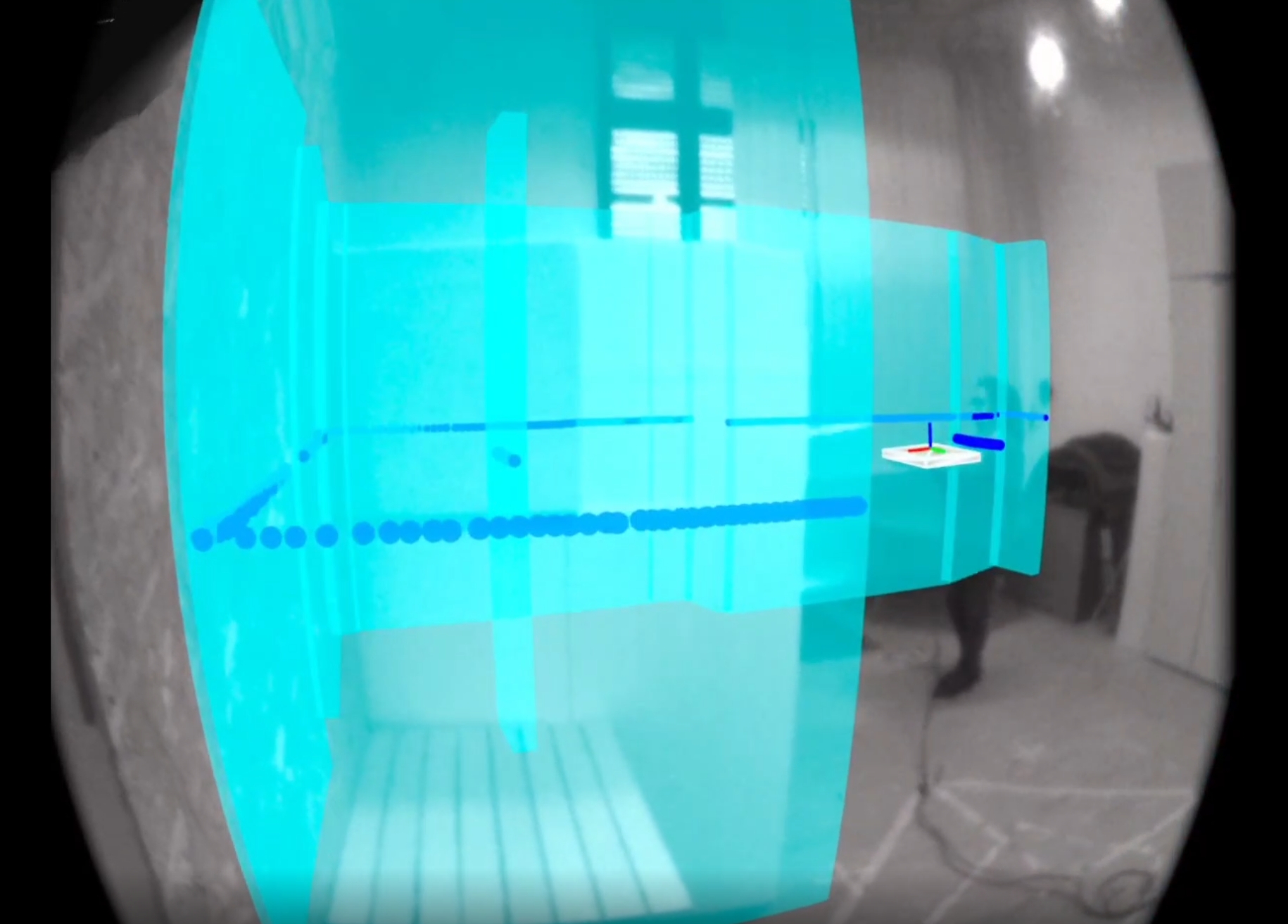
DII - Robotics Automation and Autonomous Systems Laboratory (RAASL) - Flight room per test di volo indoor La Flight Room del DII (5m x 7m circa, h 5m) dispone di un sistema di motion tracking Vicon, di una rete di protezione per test di volo, e sono disponibili diversi quadricotteri custom, minidroni crazyflie oltre a droni DJI Phantom 3 e Matrice 30T. |
 |
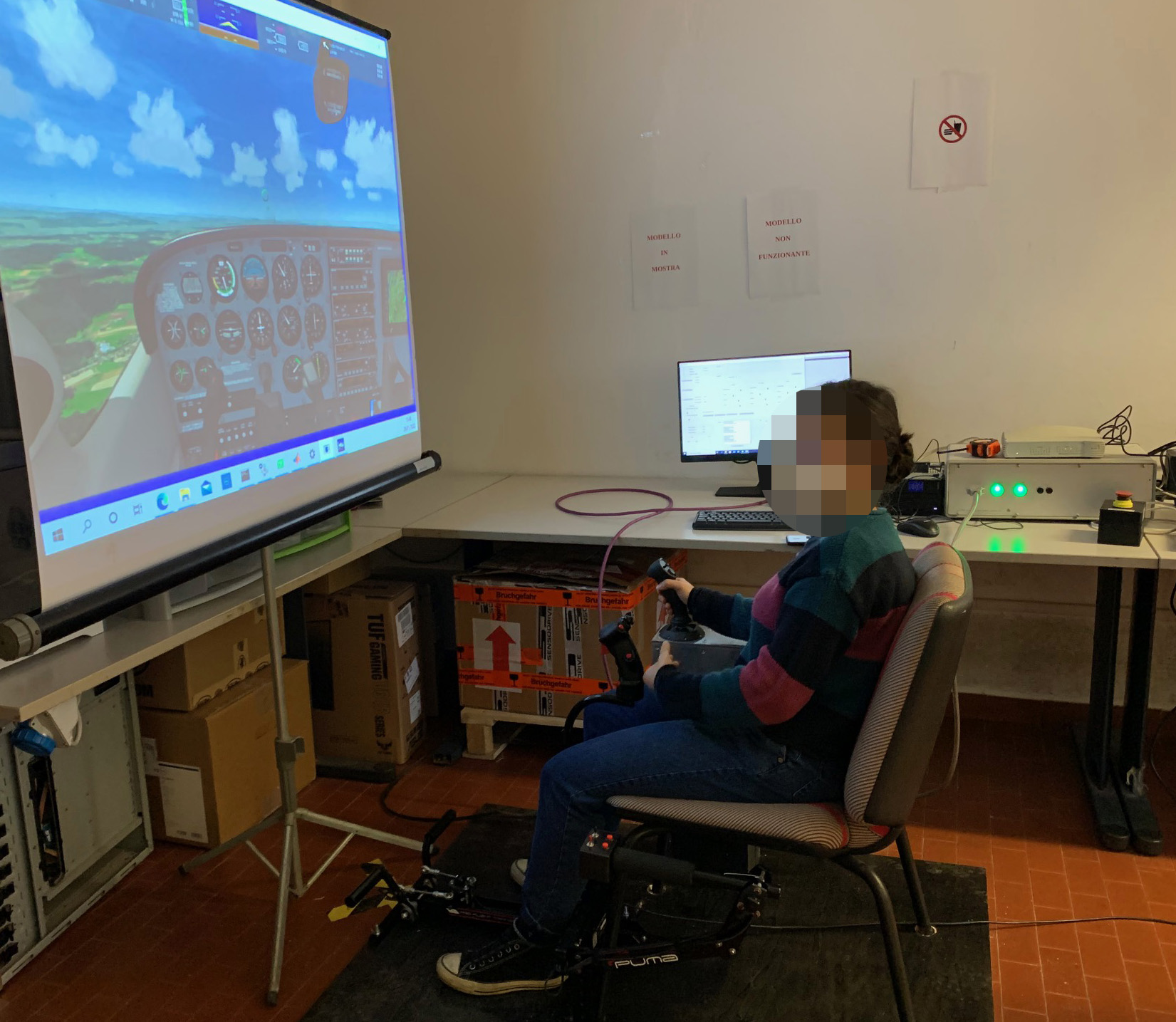
DII - Robotics Automation and Autonomous Systems Laboratory (RAASL) - Laboratorio Simulazione e Assemblaggio Prototipi Il Laboratorio Simulazione e Assemblaggio Prototipi è dove vengono costruiti e testati i prototipi dei veicoli e dei robot mobili del DII. Il laboratorio dispone anche di postazioni con computer ad alte prestazioni per la realizzazione di simulazioni 3D immersive ad alta risoluzione e l'addestramento di sistemi neurali. |
 |
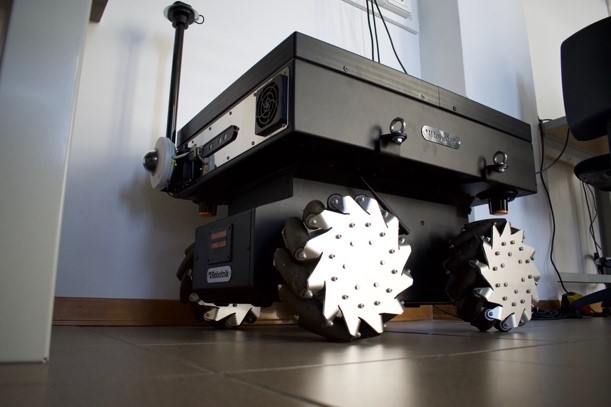
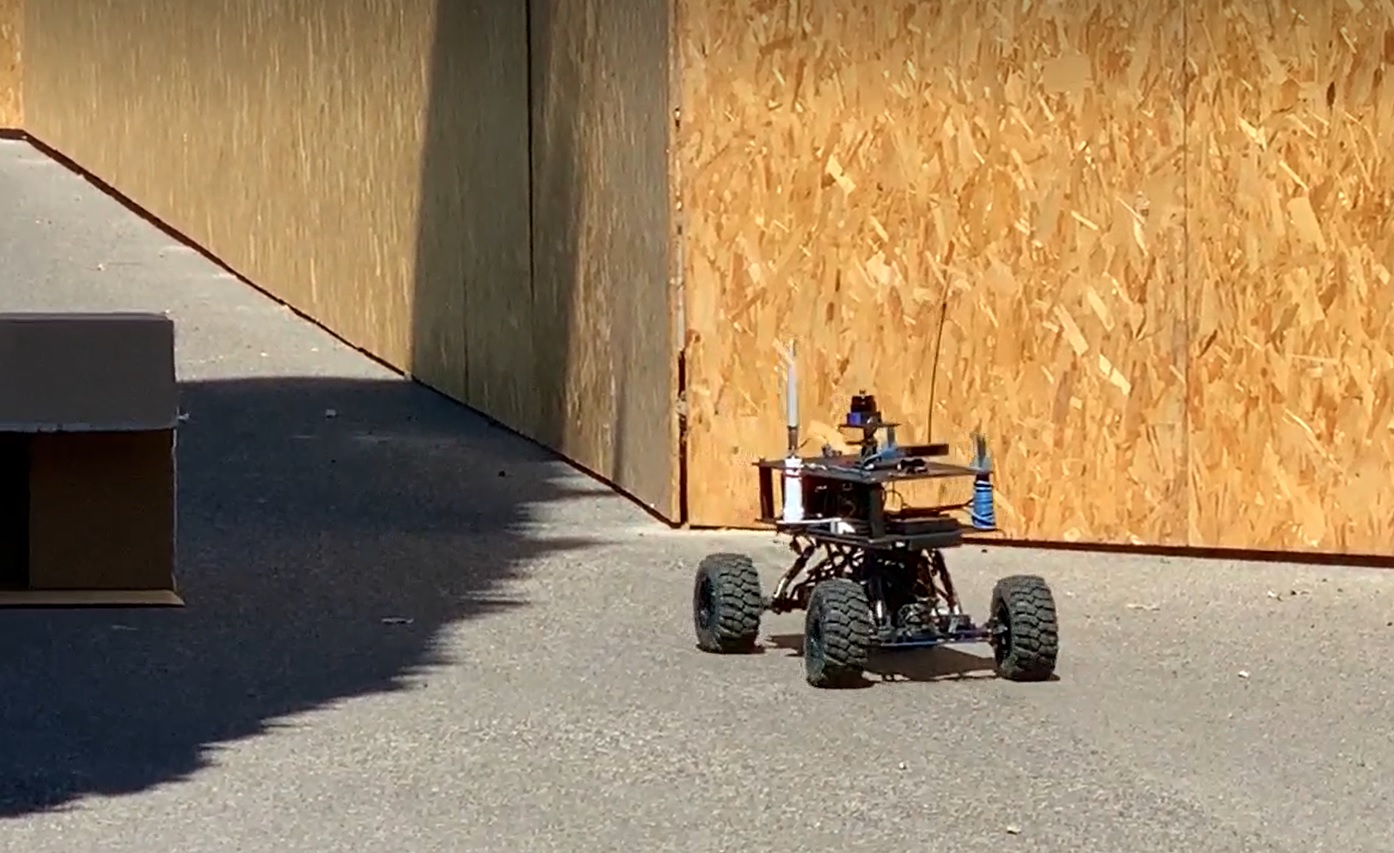
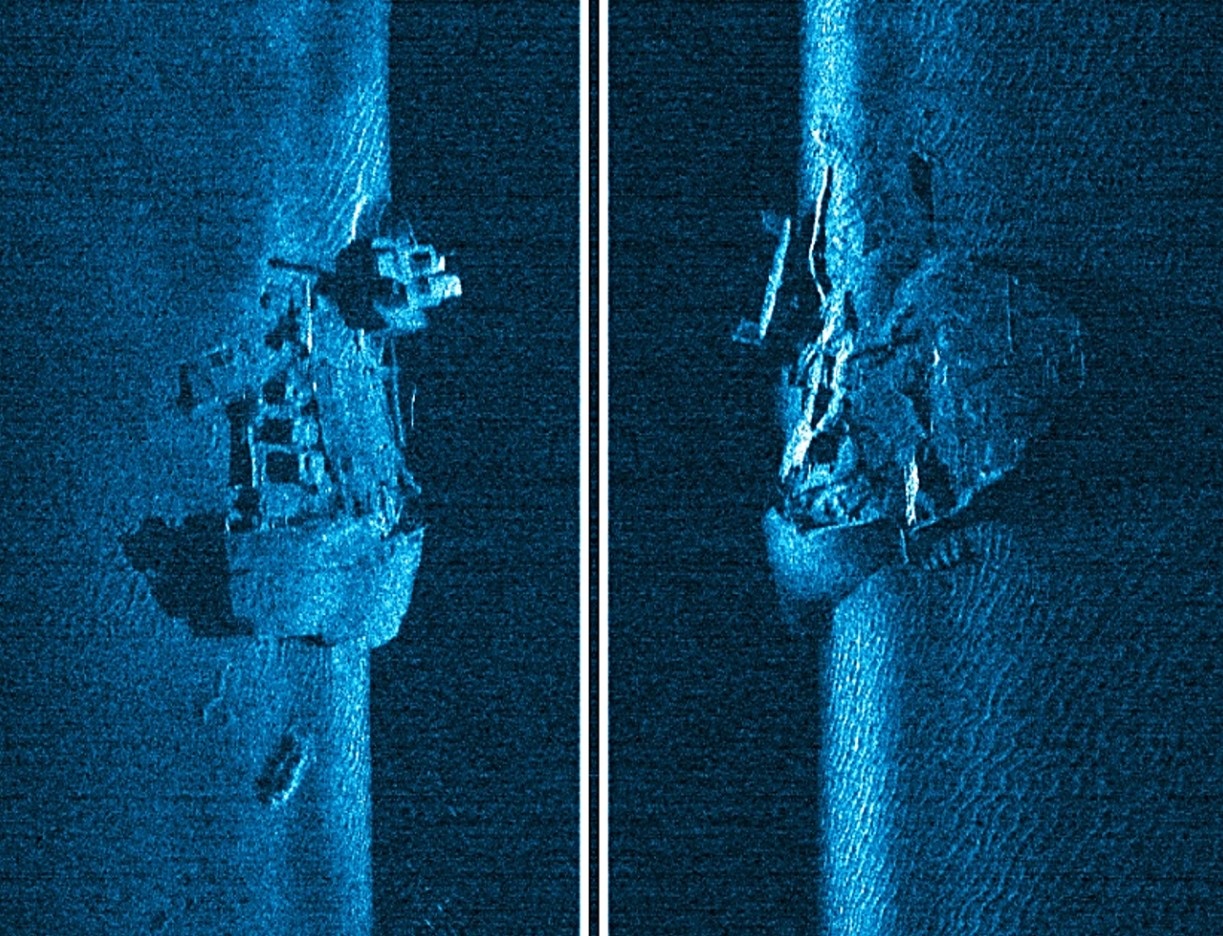
DII - Robotics Automation and Autonomous Systems Laboratory (RAASL) - Laboratorio Veicoli Autonomi Il Laboratorio Veicoli autonomi è un altro locale del DII dove vengono realizzati e messi a punto veicoli autonomi, in particolare nei domini terrestre e marino. Il laboratorio dispone di diversi veicoli su ruote commerciali o autocostruiti di varie dimensioni (Clearpath Robotics Husky A300, etc ) e di veicoli marini e sottomarini (Sistema ibrido ROV/AUV Zeno, Robot Bluerov KUDOS etc ) gestiti dal Team ERGO. |
 |
Centro "E. Piaggio" - Laboratorio di Materiali e Sistemi Intelligenti Nel laboratorio di Materiali e Sistemi Intelligenti vengono svolte ricerche di robotica collaborativa, interazione haptica, teleoperazione e locomozione robotica su gambe per robot bipedi e quadrupedi. Il laboratorio è dotato di diversi robot collaborativi (Franka Emica, Universal Robot, Kuka etc ), di un robot quadrupede ANYmal di ANYbotics e di svariati prototipi di robot con locomozione su gambe. |
 |
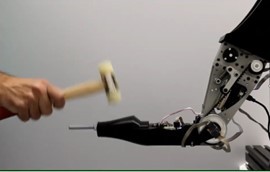
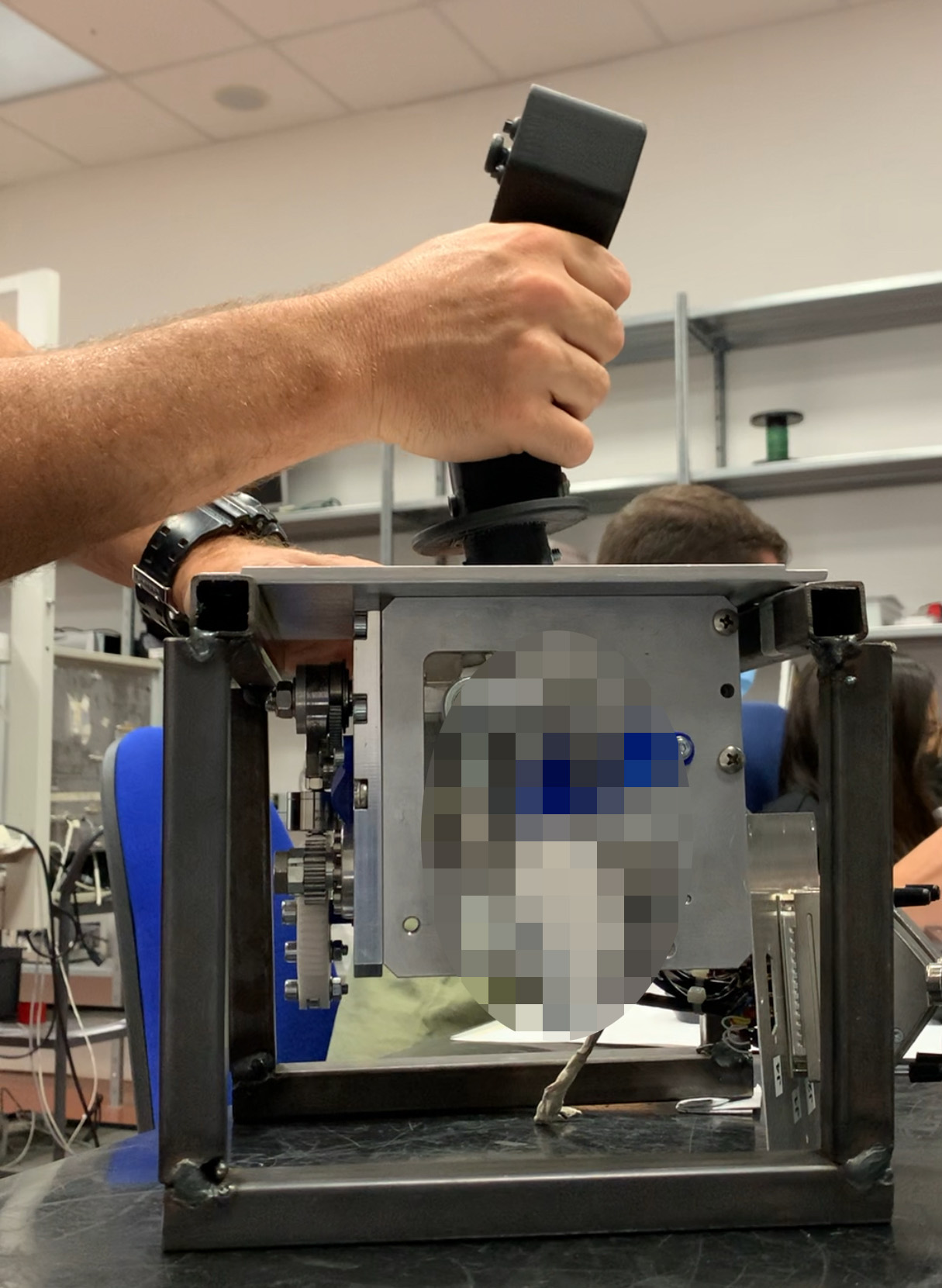
Centro "E. Piaggio" - Laboratorio di Robotica Nel laboratorio di Robotica vengono svolte ricerce di robotica avanzata, robotica umanoide, attuatori a rigidezza variabile, softrobotics e meccatronica. Il laboratorio è dotato di vari robot collaborativi basati su attuatori a rigidezza variabile ed è la casa di EGO: il robot-avatar umanoide progettato per l’interazione con l’uomo ed utilizzato per simulare scenari d’intervento e ispezione in aree danneggiate da disastri naturali o provocati dall’uomo o per applicazioni di healtcare. |
 |
CrossLab - Laboratorio Advanced manufacturing Nel Laboratorio Advanced manufacturing del Crosslab (Laboratorio multidisciplinare per l'Industria 4.0 ed il trasferimento tecnologico finanziato dal ministero dell'Università e della ricerca Scientifica con il programma "Dipartimenti di Eccellenza") vengono svolte ricerche di robotica ed automazione avanzata. Il laboratorio dispone di diversi robot collboartivi (ABB, Franka Emica, Universal Robot etc), di un robot mobile su ruote per applicazioni industriali (Robtnik RB-KAIROS) e di veicoli autonomi su ruote più piccoli (Agilex). |
 |
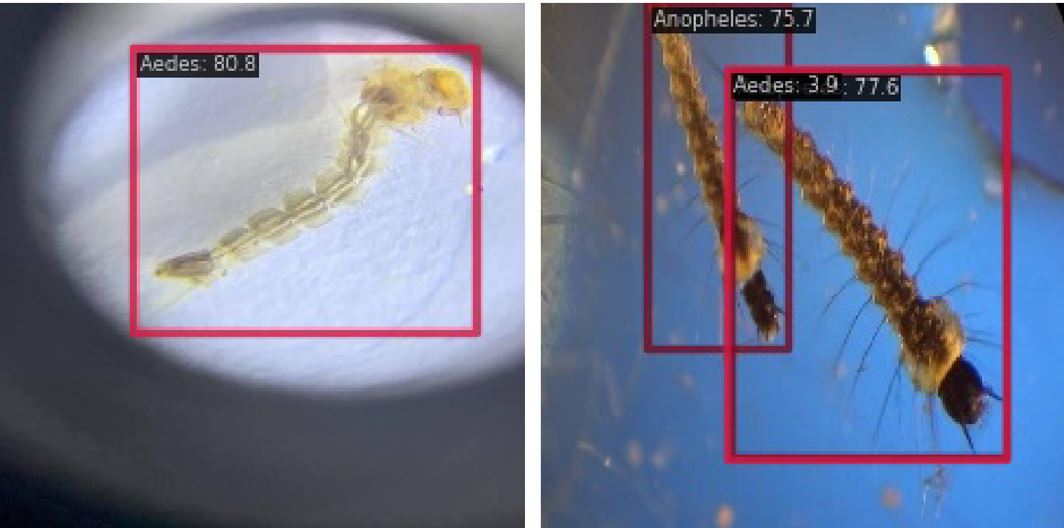
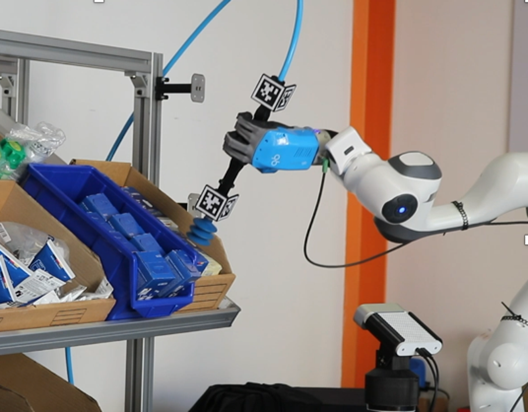
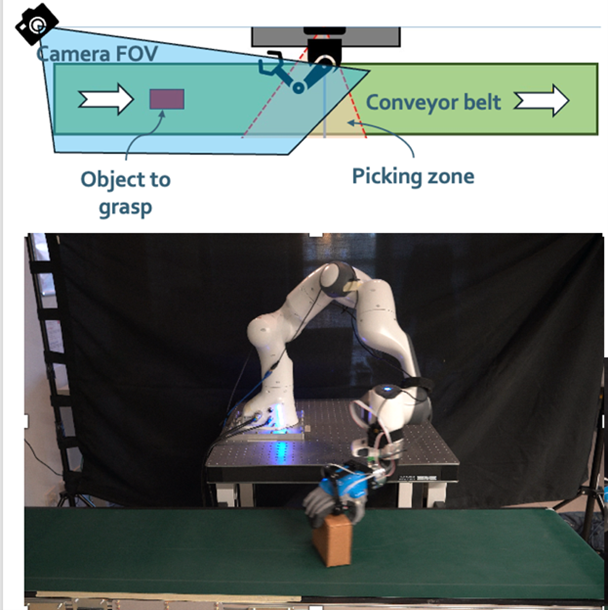
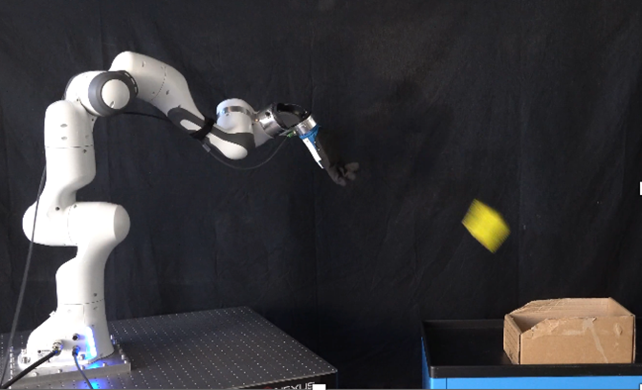
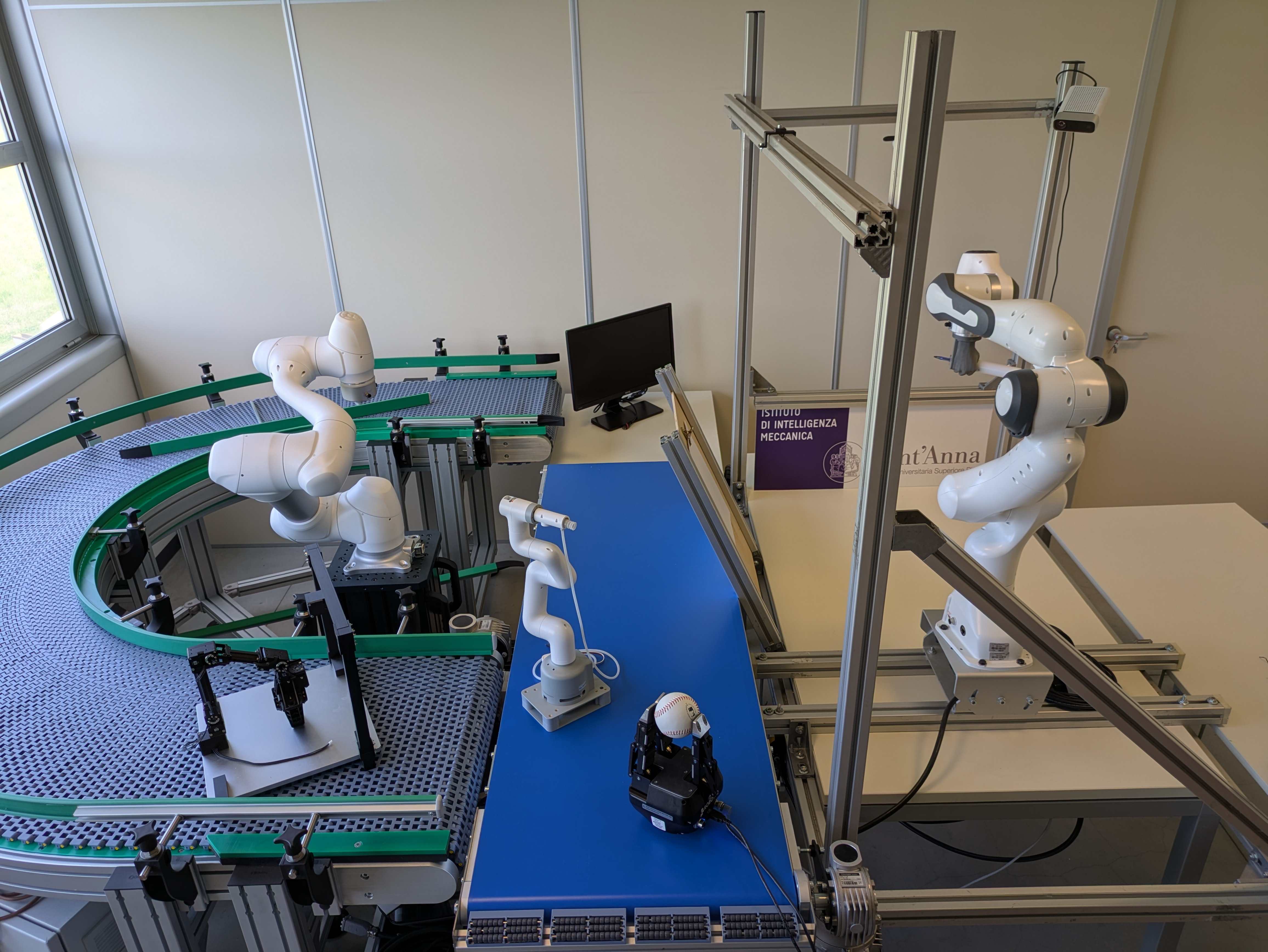
Laboratorio di Grasping e Manipolazione - Scuola Superiore Sant'Anna Il laboratorio di Grasping e Manipolazione dell'Istituto di Intelligenza Meccanica della Scuola Superiore Sant'Anna svolge attività di ricerca avanzata combinando tecnologie di controllo, pianificazione e intelligenza artificiale basata su visione e sensoristica tattile con finalità pratiche orientate all'Industria 5.0 e al manufacturing: tra cui grasping autonomo di oggetti eterogenei anche in ambienti cluttered, grasping di oggetti in movimento, manipolazione in-hand, scene understanding, collaborazione uomo-robot, e grasping basato su large language models. Il laboratorio offre diverse piattaforme robotiche e di visione tra cui il Franka Emika Panda e FR3, il Doosan m0609, la Robotiq 3F, LEAP hand, e nastri trasportatori a velocità modulabile. |
Temi di Ricerca
E' possibile trovare sotto le principali tematiche di ricerca portate avanti dai docenti del corso di studio. Per maggiori dettagli è possibile consultare le pagine dei singoli docenti accedibili dal servizio unimap.